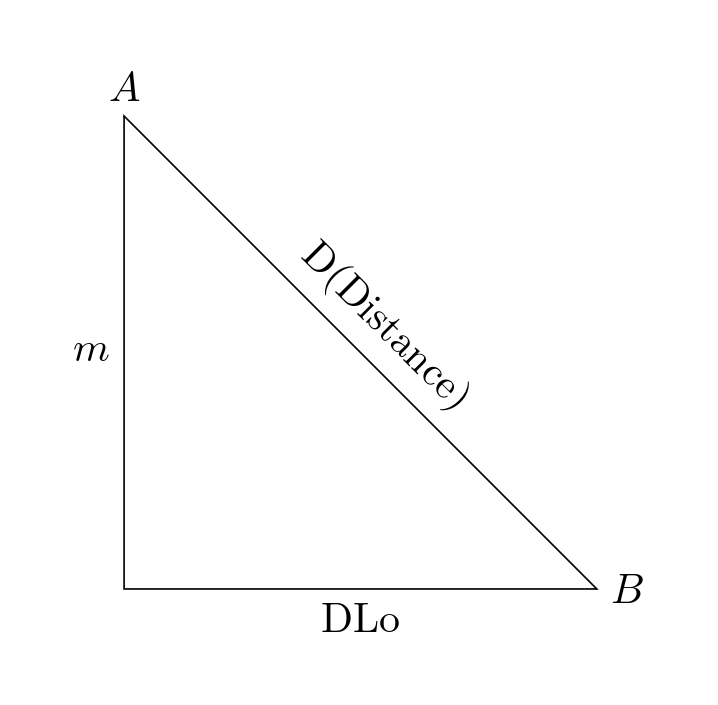
原文: Modern celestial navigators reduce their celestial observations by solving a navigational triangle whose points are the elevated pole(仰極), the celestial body, and the zenith of the observer. The sides of this triangle are the polar distance of the body (codeclination), its zenith distance (coaltitude), and the polar distance of the zenith (colatitude of the observer).1 *註1
Division 1.1: Substances and articles which have a mass explosion¹ hazard 有整體¹爆炸危險的物質或物品
Division 1.2: Substances and articles which have a projection hazard but not a mass explosion hazard 有拋射危險,但無整體爆炸危險之物質或物品
Division 1.3: Substances and articles which have a fire hazard and either a minor blast hazard or a minor projection hazard or both, but not a mass explosion hazard 具有火災危險,並同時具有或單獨具有輕微拋射危險,但無大量爆炸危險者。
Division 1.4: Substances and articles which present no significant hazard
無重大危險,在被點燃時不會立即整體爆炸,也不會有大範圍的拋射危險。
Division 1.5: Very insensitive substances which have a mass explosion hazard. 很不敏感,但有整體爆炸危險之物質或物品。
Division 1.6: Extremely insensitive articles which do not have a mass explosion hazard. 極不敏感,且無整體爆炸危險之物質或物品。
Class 4: Flammable solids ; substances liable to spontaneous combustion; substances which, in contact with water, emit flammable gases 易燃固體、自燃物質、遇水產生易燃氣體的物質
Division 4.2: Substances liable to spontaneous combustion 自燃物質
Division 4.3: Substances which, in contact with water, emit flammable gases 遇水產生易燃氣體
Class 5 — Oxidizing substances and organic peroxides 氧化物與有機過氧化物
Division 5.1: Oxidizing substances 氧化物
Disvision 5.2: Organic peroxides 有機過氧化物
Class 6: Toxic and infectious substances. 毒性與傳染性物質
Division 6.1: Toxic substances 毒性物質
Division 6.2: Infectious substances 傳染性物質
Class 7: Radioactive material 放射性物質
Class 8: Corrosive substances 腐蝕性物質
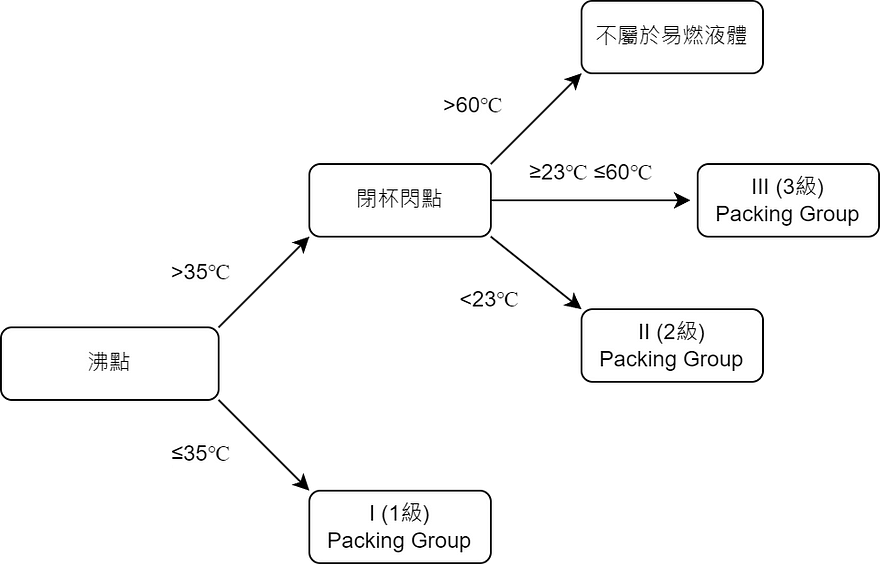
Packing group I: very dangerous substances and mixtures;
Packing group II: substances and mixtures presenting medium danger;
Packing group III: substances and mixtures that present minor danger.
Class 9: Miscellaneous dangerous substances and articles 其他危險品
其他標誌
海洋汙染物、限量包裝
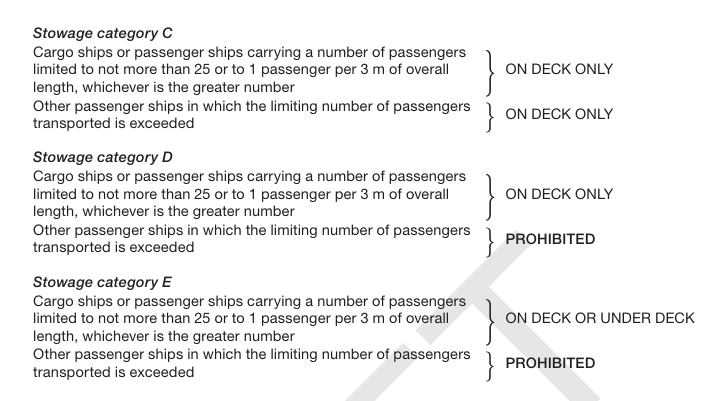
Segregation and Stowage
首先除了要看主標危險和要看副標危險,sp代表 special provision要看volume 2 3.3章
3.4.3 Stowage 積載
限量包裝的16a的種類視為種類A,16a其他規定不適用。 Dangerous goods packed in limited quantity are allocated stowage category A as defined in 7.1.3.2. The other stowage provisions indicated in column 16a of the Dangerous Goods List are not applicable.
3.4.4 Segregation
3.4.4.1Different dangerous substances in limited quantities may be packed in the same outer packaging, provided: .1 the substances comply with the provisions of 7.2.6.1; and .2 the segregation provisions of chapter 7.2, including the segregation provisions in column 16b of the Dangerous Goods List, are taken into account. However, notwithstanding the individual provisions specified in the Dangerous Goods List, substances in packing group III within the same class may be packed together subject to compliance with 3.4.4.1.1 of the IMDG Code. The following statement shall be included in the transport document: “Transport in accordance with 3.4.4.1.2 of the IMDG Code” (see 5.4.1.5.2.2).
3.4.4.2The segregation provisions of chapter 7.2 to 7.7 including the segregation provisions in column 16b of the Dangerous Goods List are not applicable for packagings containing dangerous goods in limited quantities or in relation to other dangerous goods. However, articles of division 1.4, compatibility group S shall not be stowed in the same compartment or hold, or cargo transport unit with dangerous goods of class 1 of compatibility groups A and L.